10. Moteur DC – L293D (Gestion de la rotation d’un moteur à courant continu
dans les 2 sens et à vitesse variable – Catégorie: Moteurs)
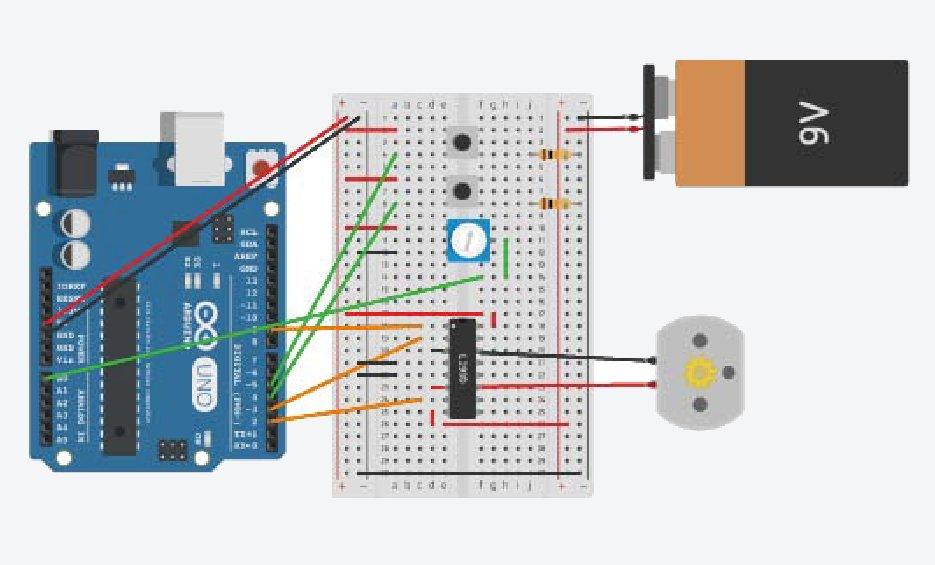
L’objectif de cette activité est de faire tourner un moteur DC dans les deux sens à vitesse de rotation variable.
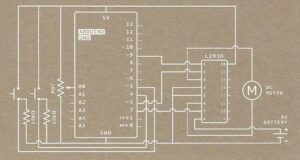
Pour cela on utilise un pont en H, le CI L293D, selon le montage suivant :
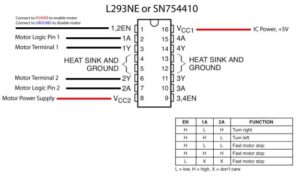
Caractéristiques techniques du L293D:
Le composant L293D est un pont de puissance composé de plusieurs transistors et relais qui permet d’activer la rotation d’un moteur.
Le L293D est un double pont-H. Il est possible de l’utiliser pour commander deux moteurs distincts dans les deux sens grâce à ses 4 canaux.
• Courant Max Régime continu : 600mA (x2)
• Courant de pointe Max < 2ms : 1200mA
• VS Max Alim moteur : 36v
• VSS Max Alim logique : 7v
• Nombre de broches : 16 DIP
• Perte de tension : 1.3v
. 1,2EN permet d’envoyer (ou pas) la tension sur les sorties du moteur via 1Y et 2Y et commande l’activation/désactivation du premier Pont-H. Si 1,2EN = GND, le pont-H est déconnecté et le moteur ne fonctionne pas. Si 1,2EN = VSS, le pont-H est connecté aux sorties et le moteur peut alors fonctionner dans un sens ou dans l’autre si les tensions appliquées sur 1A et 2A sont différentes (cf. tableau ci-dessus).
. 1A et 2A sont les broches de commande du Pont-H 1Y / 2Y. Ils sont directement branchés à l’Arduino pour commander le sens du courant entre 1Y et 2Y.
. 1Y et 2Y sont branchés directement sur le moteur.
. GROUND doit être raccordé à la masse de la source d’alimentation de puissance VCC2(moteur) et à la masse de la source d’alimentation de l’Arduino.
. VCC2 : Alimentation de puissance des moteurs.
. 3,4EN commande l’activation du second pont-H constitué de 3Y / 4Y
. 3A et 4A sont les broches de commande du Pont-H 3Y / 4Y. Ils sont directement branchés à l’Arduino pour commander le sens du courant entre 3Y et 4Y.
. 3Y et 4Y sont branchés directement sur le moteur.
Le programme
Voici le code de l’activité :
|
const int controlPin1 = 2;
int motorEnabled = 0; void setup(){
void loop(){ if (directionSwitchState != previousDirectionSwitchState) { |
Déroulement du programme :
– 1. Déclaration des constantes et variables :
. const int controlPin1 = 2 (constante nombre entier correspondant à la broche de l’Arduino reliée à la broche 7 du L293D)
. const int controlPin2 = 3 (constante nombre entier correspondant à la broche de l’Arduino reliée à la broche 2 du L293D)
. const int enablePin = 9 (constante nombre entier correspondant à la broche de l’Arduino reliée à la broche 1 du L293D pour activer la rotation du moteur)
. const int directionSwitchPin = 4 (constante nombre entier correspondant à la broche du bouton poussoir pour le sens de rotation du moteur)
. const int onOffSwitchStateSwitchPin = 5 (constante nombre entier correspondant à la broche du bouton poussoir pour la mise en route du moteur)
. const int potPin = A0 (constante nombre entier correspondant à la broche du potentiomètre pour le réglage de la vitesse de rotation)
. int onOffSwitchState = 0 (variable nombre entier pour stocker la valeur du potentiel de la broche du bouton poussoir pour la mise en route du moteur)
. int previousOnOffSwitchState = 0 (variable nombre entier pour stocker l’ancienne valeur du potentiel de la broche du bouton poussoir pour la mise en route du moteur)
. int directionSwitchState = 0 (variable nombre entier pour stocker la valeur du potentiel de la broche du bouton poussoir pour le sens de rotation du moteur)
. int previousDirectionSwitchState = 0 (variable nombre entier pour stocker l’ancienne valeur du potentiel de la broche du bouton poussoir pour le sens de rotation du moteur)
. int motorEnabled = 0 (variable nombre entier indiquant si le moteur fonctionne)
. int motorSpeed = 0 (variable nombre entier pour la vitesse de rotation)
. int motorDirection = 1 (variable nombre entier pour le sens de rotation)
– 2. Initialisation des entrées et sorties :
. Initialisation de la broche du bouton poussoir pour la mise en route du moteur en entrée,
. Initialisation de la broche du bouton poussoir pour le sens de rotation du moteur en entrée,
. Initialisation des broches de contrôle du moteur (broches « controlPin1 », « controlPin2 » et « enablePin ») en sortie,
. La broche « enablePin » pour l’activation de la rotation du moteur est mise à un niveau bas.
– 3. Fonction principale en boucle :
–> Lecture de la valeur de la broche du bouton poussoir pour la mise route du moteur,
–> Lecture de la valeur de la broche du bouton poussoir pour le sens de rotation,
–> Réglage de la vitesse de rotation du moteur après lecture de la valeur de la broche du potentiomètre,
–> Mise en rotation du moteur ou arrêt du moteur si changement de la valeur du bouton poussoir correspondant,
–> Changement du sens de rotation si appui sur le bouton poussoir correspondant.

