”Détecteur d’obstacles”
Comme il est possible de mesurer une distance avec un Arduino et un capteur à ultrasons, nous allons dans cette activité, réaliser un détecteur d’obstacle qui déclenchera une alarme lumineuse et sonore quand le capteur est situé en dessous d’une distance, d, fixée.
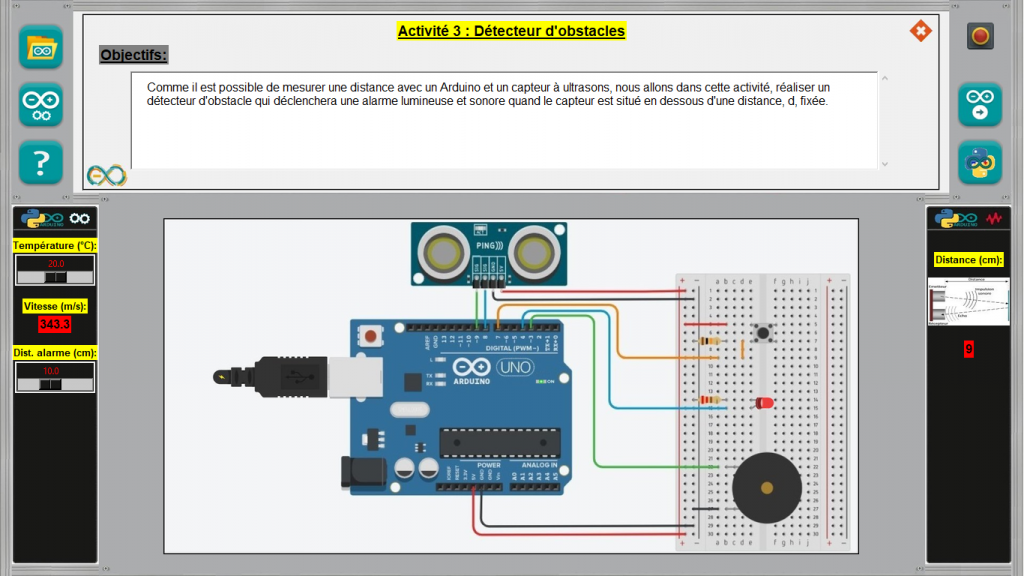
ARDUINO LAB – Fenêtre « Projet 4 – Activité 3 »
Si le mode de fonctionnement est le ”contrôle de l’Arduino”, après avoir cliqué sur la prise USB, un menu permettant de régler la température de l’air est affiché.
La vitesse théorique du son dans l’air en fonction de la température indiquée est alors calculée et affichée.
La distance minimale de déclenchement de l’alarme est également choisie dans ce menu.
Un appui sur le bouton poussoir réel ou virtuel déclenche la mesure de la durée de propagation, Dt, de l’onde ultrasonore.
La distance, en cm, entre le capteur et l’obstacle est alors calculée, à partir de Dt et de la célérité théorique du son dans l’air, et affichée dans le menu ”Résultats”.
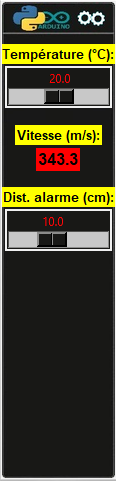
Menu Réglages
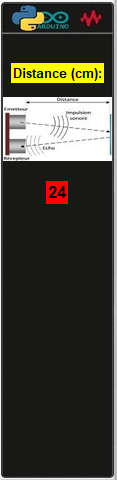
Menu Résultats
Comme dans l’activité précédente, en mode ”simulation”, l’utilisateur doit régler la durée de propagation, Dt, des ondes ultrasonores dans le menu ”Réglages” et après avoir appuyé sur le bouton poussoir virtuel, la distance, en cm, correspondant à ce Dt est calculée et affichée le menu ”Résultats”.
Dans les deux cas, si la distance calculée est inférieure à la distance minimale, l’alarme est déclenchée.
Les mesures sont arrêtées en appuyant de nouveau sur le bouton poussoir réel ou virtuel, en mode ”Contrôle de l’Arduino”, ou virtuel en mode ”Simulation”.
A tout moment, il est possible de visualiser le code et son algorithme, programmé en langage Arduino IDE ou en Python, permettant de réaliser cette activité, en cliquant sur les boutons :



