Cette catégorie regroupe des sketchs utilisant un émetteur-récepteur d’ondes ultrasonores pour Arduino.
Tous ces sketchs ont déjà été présentés dans la rubrique « Activités pour les lycées / Ondes ultrasonores ».
1. Vitesse_son (Code: Détermination de la vitesse du son dans l’air)
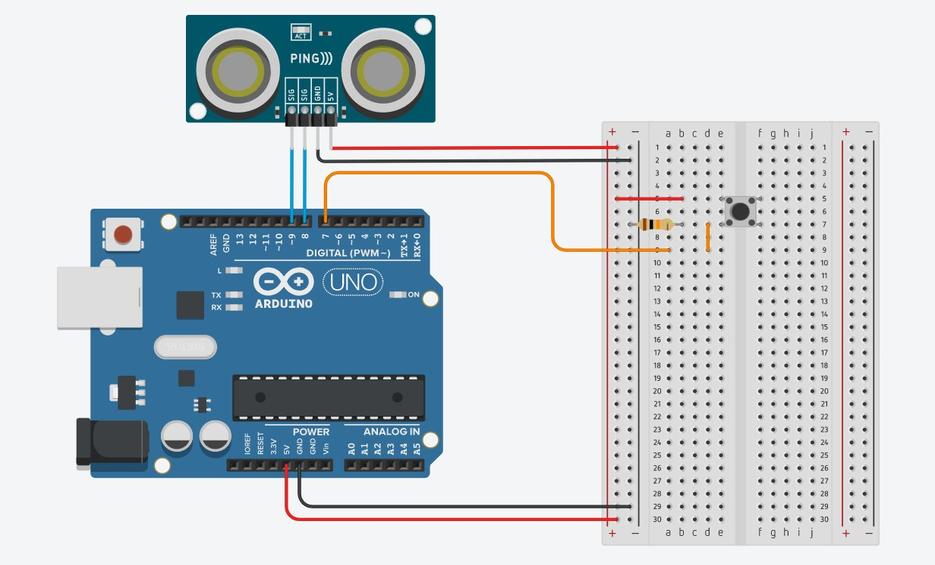
Dans cette activité, nous allons déterminer expérimentalement la vitesse de propagation des ondes sonores en mesurant, à l’aide d’un capteur à ultrasons, le HC-SR04, la durée de propagation Dt de l’onde sonore entre l’émetteur et le récepteur situés à une distance d connue d’un obstacle.
Les mesures de vitesse du son dans l’air commencent après un appui sur le bouton poussoir et sont arrêtées en appuyant de nouveau sur celui-ci.
2. Telemetre (Code: Mesure de distances)
Connaissant la célérité des ondes sonores dans l’air, dans cette activité, nous allons utiliser le capteur à ultrasons de notre circuit d’étude (idem sketch « Vitesse_son ») pour mesurer des distances en mesurant la durée de propagation Dt de l’onde sonore entre l’émetteur et le récepteur situés à une distance d inconnue d’un obstacle. C’est le principe du Sonar.
Les mesures de distance commencent après un appui sur le bouton poussoir et sont arrêtées en appuyant de nouveau sur celui-ci.
La température de l’air est une variable qu’il est possible de modifier. La vitesse théorique du son dans l’air en fonction de la température indiquée est alors calculée et utilisée pour déterminer la distance entre le capteur et l’obstacle.
3. Detecteur_obstacles (Code: Détecteur d’obstacles)
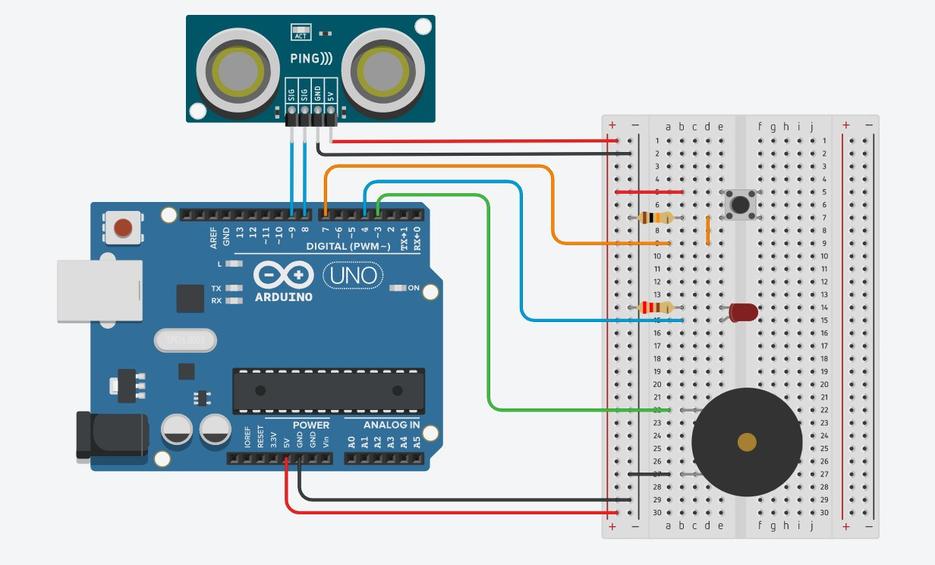
Comme il est possible de mesurer une distance avec un Arduino et un capteur à ultrasons, nous allons dans cette activité, réaliser un détecteur d’obstacle qui déclenchera une alarme lumineuse et sonore, avec la DEL et le buzzer de notre circuit d’étude, quand le capteur est situé en dessous d’une distance d fixée.
La température de l’air est une variable qu’il est possible de modifier. La vitesse
théorique du son dans l’air en fonction de la température indiquée est alors calculée et utilisée pour
déterminer la distance entre le capteur et l’obstacle.
On pourra également modifier la distance minimale de déclenchement de l’alarme.

